You can find my full articles on my Google Scholar profile
Selected Publications
2026
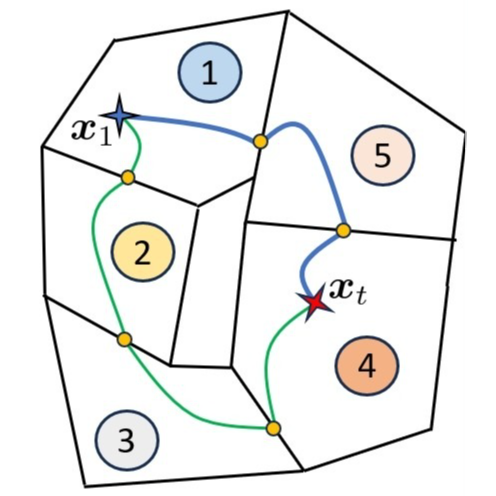
 | Sampling-Based Constrained Motion Planning with Products of Experts,
Amirreza Razmjoo, Teng Xue, Suhan Shetty, and Sylvain Calinon.
The International Journal of Robotics Research (IJRR).
|
 | Geometry-aware Policy Imitation,
Yimming Li, Nael Darwiche, Amirreza Razmjoo, Sichao Liu, Yilun Du, Auke Ijspeert, and Sylvain Calinon.
The International Conference on Learning Representations (ICLR)
|
2025
 | Monte Carlo Tree Search with Tensor Factorization for Robot Optimization,
Teng Xue, Yan Zhang, Amirreza Razmjoo, and Sylvain Calinon.
Under review
|
 | Robust Contact-rich Manipulation through Implicit Motor Adaptation,
Teng Xue, Amirreza Razmjoo, Suhan Shetty, and Sylvain Calinon.
The International Journal of Robotics Research (IJRR).
|
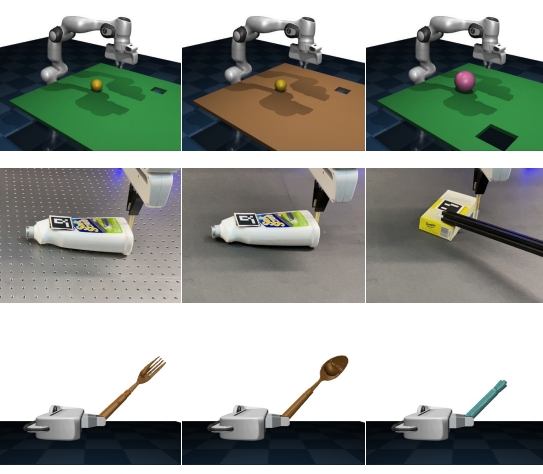
| | CCDP: Composition of Conditional Diffusion Policies with Guided Sampling
Amirreza Razmjoo, Sylvain Calinon, Michael Gienger, and Fan Zhang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
(Outstanding paper award at TARo Workshop at IROS) |
 | A Smooth Analytical Formulation of Collision Detection and Rigid Body Dynamics With Contact,
Onur Beker, Nico Gürtler, Ji Shi, A. Renè Geist, Amirreza Razmjoo , Georg Martius, Sylvain Calinon
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
|
2024
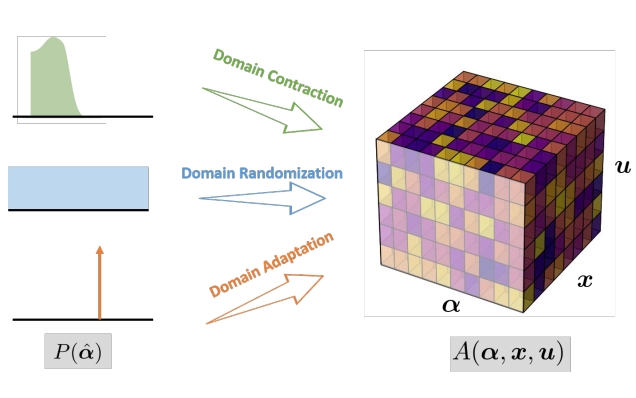
 | Robust Manipulation Primitive Learning via Domain Contraction,
Teng Xue, Amirreza Razmjoo, Suhan Shetty, and Sylvain Calinon.
8th Annual Conference on Robot Learning (CoRL).
|
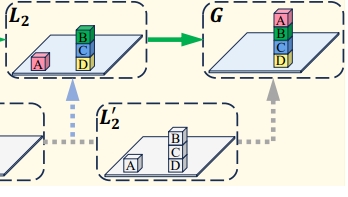 | Logic Learning from Demonstrations for Multi-step Manipulation Tasks in Dynamic Environments,
Yan Zhang, Teng Xue, Amirreza Razmjoo, and Sylvain Calinon.
IEEE Robotics and Automation Letters (RA-L).
|
 | Logic-Geometric learning and Control Using Graph of Tensor Networks,
Teng Xue, Amirreza Razmjoo, Suhan Shetty, and Sylvain Calinon.
Workshop at Robotics: Science and Systems (RSS).
|
 | Logic-Skill Programming: An Optimization-based Approach to Sequential Skill Planning,
Teng Xue, Amirreza Razmjoo, Suhan Shetty, and Sylvain Calinon.
Robotics: Science and Systems (RSS).
|
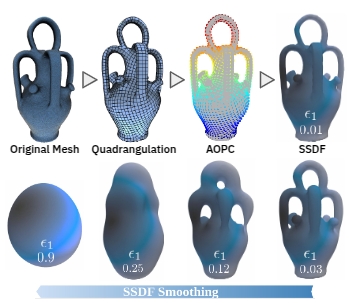
 | Configuration Space Distance Fields for Manipulation Planning,
Yimming Li, Xuemin Chi, Amirreza Razmjoo, and Sylvain Calinon.
Robotics: Science and Systems (RSS). (Outstanding paper Finalist)
|
 | D-LGP: Dynamic Logic-Geometric Program for Combined Task and Motion Planning
Teng Xue, Amirreza Razmjoo, and Sylvain Calinon.
Proc. IEEE Intl Conf. on Robotics and Automation (ICRA).
|
 | Learning Robot Geometry as Distance Fields: Applications to Whole-body Manipulation
Yimming Li, Yan Zhang, Amirreza Razmjoo, and Sylvain Calinon.
Proc. IEEE Intl Conf. on Robotics and Automation (ICRA).
|
2023
 | Learning Joint Space Reference Manifold for Reliable Physical Assistance
Amirreza Razmjoo , Tilen Brecelj, Kristina Savevska, Aleš Ude, Tadej Petrič, and Sylvain Calinon.
In Proc. IEEE Intl Conf. on Intelligent Robots and Systems (IROS).
|
 | A geometric optimal control approach for imitation and generalization of manipulation skills
Boyang Ti, Amirreza Razmjoo, Yongsheng Gao, Jie Zhao, and Sylvain Calinon.
Robotics and Autonomous Systems (RAS).
|
2021
 | Optimal Control Combining Emulation and Imitation to Acquire Physical Assistance Skills
Amirreza Razmjoo, T. S. Lembono, and Sylvain Calinon.
Proc. IEEE Intl Conf. on Advanced Robotics (ICAR).
|
